
|
|
|
|
|
|
|
|
| RESEARCH | |
| Bio-Inspired Spinal Actuation in Quadruped Robots | |
Overview: Being inspired from spinal structure in fast running land mammals, this research focuses on developing new quadruped robot models with additional spine actuation. Differing from standard quadruped robots with stiff backed trunk designs, the new robot model developed in this research embodies flexible back spine mechanism which is shown to increase fast and dynamic locomotion performance in means of running speed, hopping height and energy transform. |
|
|
Motivation: |
Nature evolves into perfection in order to decide who will survive. It is observed that many quadrupedal land mammals use their flexible spine in order to catch their prey or run away from predators. Inspired from these fast running animals which perform high dexterity while running, this research tries to imitate the spinal structure in animals which;
|
|
| Model: | 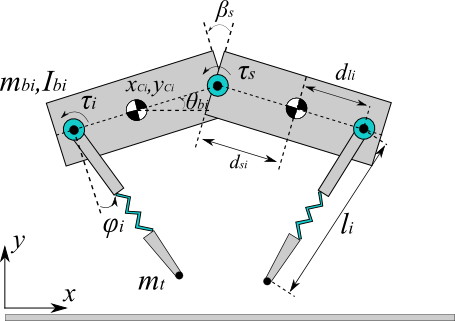 |
Compared to the standard models used in state-of-the-art quadruped robots, the model developed in this research embodies an extra joint mechanism to imitate the spinal motion that takes place in inspired animals. Driven by an electric motor, spinal joint bends two body parts to required poses to perform dynamic gait. Furthermore, the research includes the development of a new gait model which is compliant with the flexible robot model. Current research is focused on bounding gait to compare the new models with existing models. |
|
 |
Simulations: |
Extensive simulations show that the proposed model inreases the performance in means of running speed, hopping height and feet clearance. Current model achieves 2.02 m/s running speed with 0.1 m hopping interval. When compared to standard stiff backed models, actuated spine locomotion promises increase in efficiency when further research takes place. Videos:
|
|
| Publications: | |
|
|